

 QQ
QQ
公司总部地址:上海市嘉定区南翔镇、公司上海机器人仓库:宝山区、外冈镇等等
详细可咨询李经理:13062761152(微信同号)
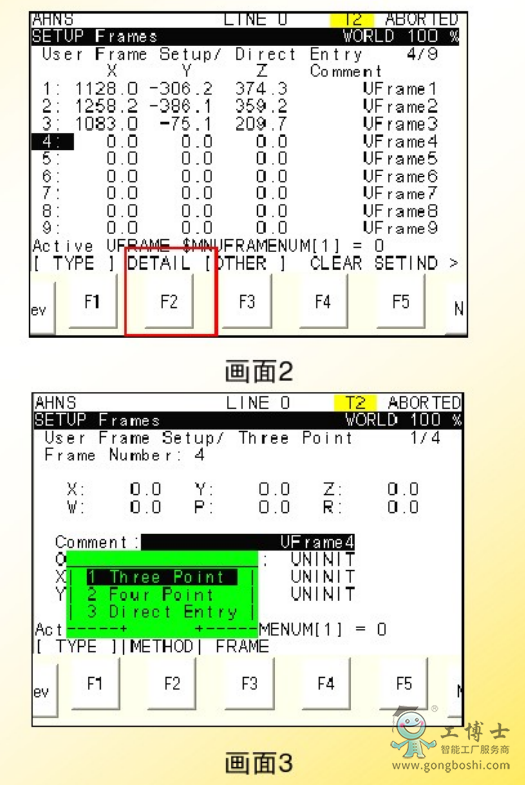
1.依次按键操作:[ MENU ](菜单)[SETUP](设定) --F1 [ Type](类型) -- [
2.按F3 [OTHER ] (坐标)选择[ USER

4.按F2 [ METHOD] (方法)见画面3,移动光标,选择所用的设置方法[ Three point] (3点记录) ,按. [ENTER](回车) 确认入具体设置画面4
6.将机器人的示教坐标切换成全局(WORLD)坐标;

a)示教机器人沿用户自己希望的+X方向至少移动250mm;
b)光标移至X Direction Point (X轴方向)行,按[SHIFT] +F5[ RECORD] (位置记录) 记录;
c)记录完成,UNINIT (为示教)变为RECORDED (记录完成)
d)移动光标到Orient Origin Point(坐标原点) ;
e)按[SHIFT] + [ F4MOVE_ TO](位置移动)使示教点回Orient Origin Point(坐标原点)。

以上内容来源于:网络
侵权删
更多机器人咨询请咨询:发那科机器人配件


