

 QQ
QQ
在机器人通电并消除报警之后,接下来我们首要做的便是:对裸机系统进行备份。备份的主要目的是防止我们在后期系统配置的过程中出现硬件之外的故障,可以通过裸机备份快速恢复机器人的正常状态。
备份是一项常规任务,在整个调试过程中,只要我们对系统或程序进行了优化改变,随时备份,以保证备份的同步更新。
备份分主要为两种:普通备份和镜像备份。普通备份主要是保存各种文件,而镜像备份是保存了整个系统。下面我们就来讲解
一下如何进行备份。
一、普通备份
1)、将U盘插入示教器上的USB接口或控制柜上的USB接口
2)、按主菜单MENU—文件-文件,按Enter键进入到下一画面

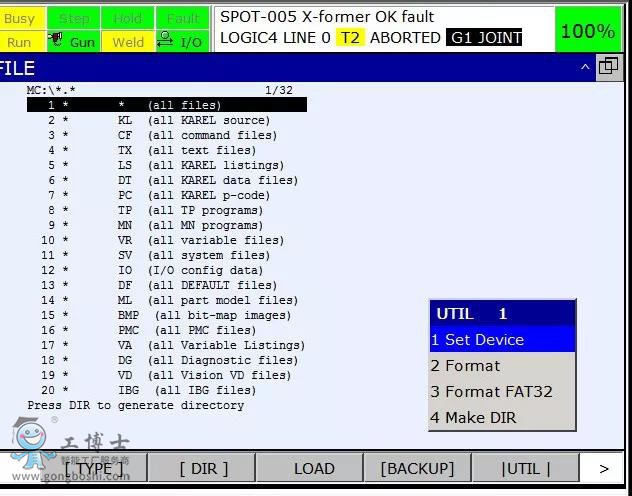
3)、在出现的以下画面中,按F5 UTIL—1 Set Device(此步操作*好是在英文界面下进行操作,多数情况下中文界面操作后无法出现下一步的画面),出现下一步的画面
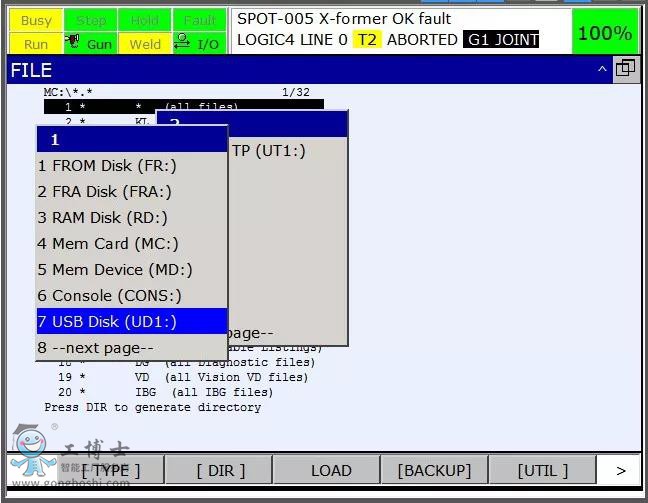
4)、在出现的画面中,选择读取备份设备(U盘)的路径:UD1为把U盘插到了控制柜的USB接口上,UT1为把U盘插到了示教器的USB接口上。根据插U盘的位置进行路径的选择
5)、为了方便教学,我们切换回中文界面。在接下来的画面中,我们选择F5—创建目录,然后将文件夹命名为RB1,按ENTER键

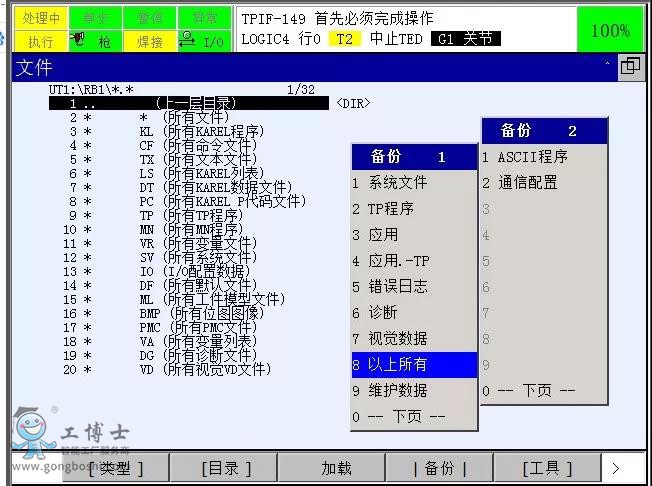
6)、在接下来的画面中,按键F4 备份—8 以上所有,按ENTER,会出现提示“文件备份前删除文件UT1\RB1\吗?”,这里的意思是要删除文件夹RB1里的原有文件,确认好选择F4 “是”;“删除UT1\RB1并备份所有文件?”,选择F4 “是”
6)、在接下来的画面中,你会看到备份进度情况,直至备份完成

在新版的机器人系统中,镜像备份前半部分的操作步骤与普通备份一样,只是在选择备份方式时选择“Image 备份”,选中之后,按ENTER键,系统会自动重启进入镜像备份进程。
注意:
镜像备份和普通备份要存放在不同的文件夹,比如,普通备份存放在“RB1”中,那镜像备份就要另建文件夹进行备份。
